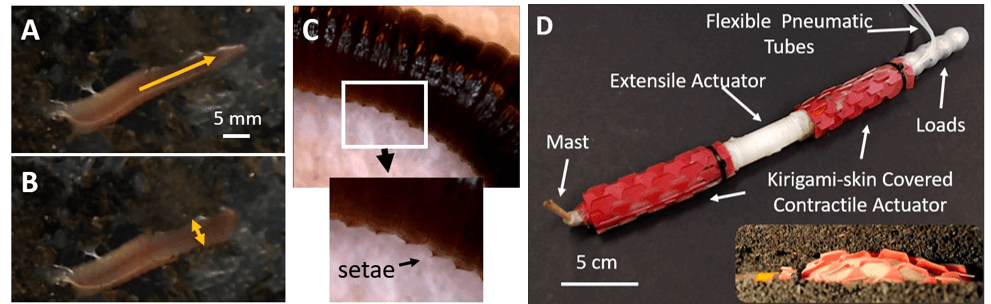
Motivation: Earthworms locomote through the soil by coordinated contraction of their circular and longitudinal muscles in a motion called retrograde peristalsis, where the movement of the contractile wave flows opposite the direction of locomotion. To move forward, the earthworm must push against the burrow walls, anchoring itself by expanding segments of its body radially. Earthworm bristles, called setae, extend when the longitudinal muscles are contracted. Setae are known to improve anchoring during surface locomotion, but their efficacy during subsurface movement is still unknown.

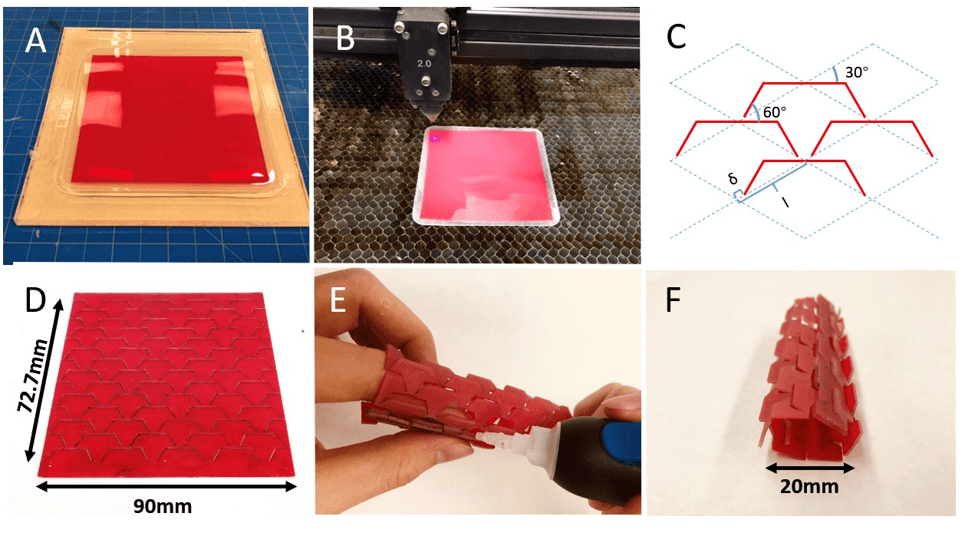
Research Focus: We designed a soft, burrowing robot which can locomote in soil. Inspired by earthworm setae and Kirigami skin, we designed a Kirigami skin, especially for contractile actuators. The Kirigami skin structures pop up spike-like ‘setae’ when the actuator expands radially. Additionally, we improved the robustness of Kirigami skin by introducing a novel silicone-plastic layer fabrication method. With Kirigami skin, the anchoring ability of an actuator can go beyond its limits. During the anchoring process, the spike-like ‘setae’ of Kirigami skin can provide enough traction to facilitate burrowing while causing minimal disturbances on the terrain surface (in cohesive material) compared to a bare contractile actuator. This enhanced traction can improve the gait performance of the earthworm (Figs. 1 and 2).
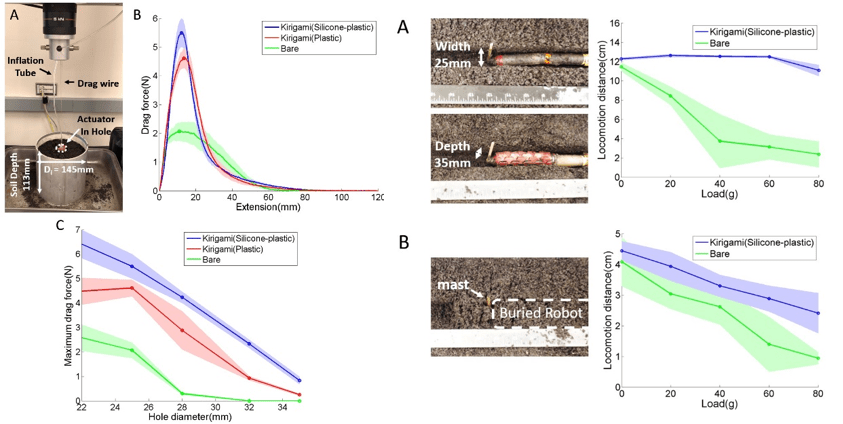
Findings and Implications: The result shows anchoring ability improvement with the help of Kirigami skin. We also improved the robustness of Kirigami skin by introducing a novel silicone-plastic layer fabrication method. With Kirigami skin, the anchoring ability of actuator can go beyond its limits (Fig. 3). Also, silicon-plastic Kirigami skin performs better in anchoring ability than plastic Kirigami. The Kirigami skin-covered robot exhibits a greater maximum drag force (improved from 2.1 ± 0.3N to 5.5 ± 0.5N in 25mm hole diameter condition), greater forward displacement, and higher traction (e.g., with an 40g payload, the 3.7±2.8cm improved to a 12.5±0.1cm in 6 gait cycles). The performance of the silicone-plastic Kirigami skin covered robot improves when the soil is compacted, due the setae-like surface features (Fig. 4).
Researchers
- Bangyuan Liu (PhD Student)
- Yasemin Ozkan-Aydin (Postdoctoral Researcher)
- Jennifer Molnar (Former ARM Lab Member)
Publications
- Kirigami skin improves soft earthworm robot anchoring and locomotion under cohesive soil, B. Liu, Y. Ozkan-Aydin, D. Goldman, and F. Hammond III, In 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft) (pp. 828-833). IEEE., pp. 1705-1710. (DOI)
- Design of a soft robophysical earthworm model, Y. Ozkan-Aydin, J. Molnar, D. Goldman, and F. Hammond III, In 2018 IEEE International Conference on Soft Robotics (RoboSoft), IEEE., pp. 83-87. (DOI)