Motivation: Several recently developed robotic assist devices have implemented some form of sensory feedback to enhance user intuition and dexterity. The most common form of sensory feedback is haptic. Haptic feedback can be displayed with several methods, including electrotactile, mechanotactile, and vibrotactile stimulation, and has been shown can reduce cognitive loading and promote accelerated motor learning in rehabilitation. However, the sense of touch alone does not allow a prostheses user to gauge the kinematic state of a device, which, for a parallel gripper, allows discrimination of grasp aperture and object size, and further eliminates the need for visual inspection during manipulation tasks.
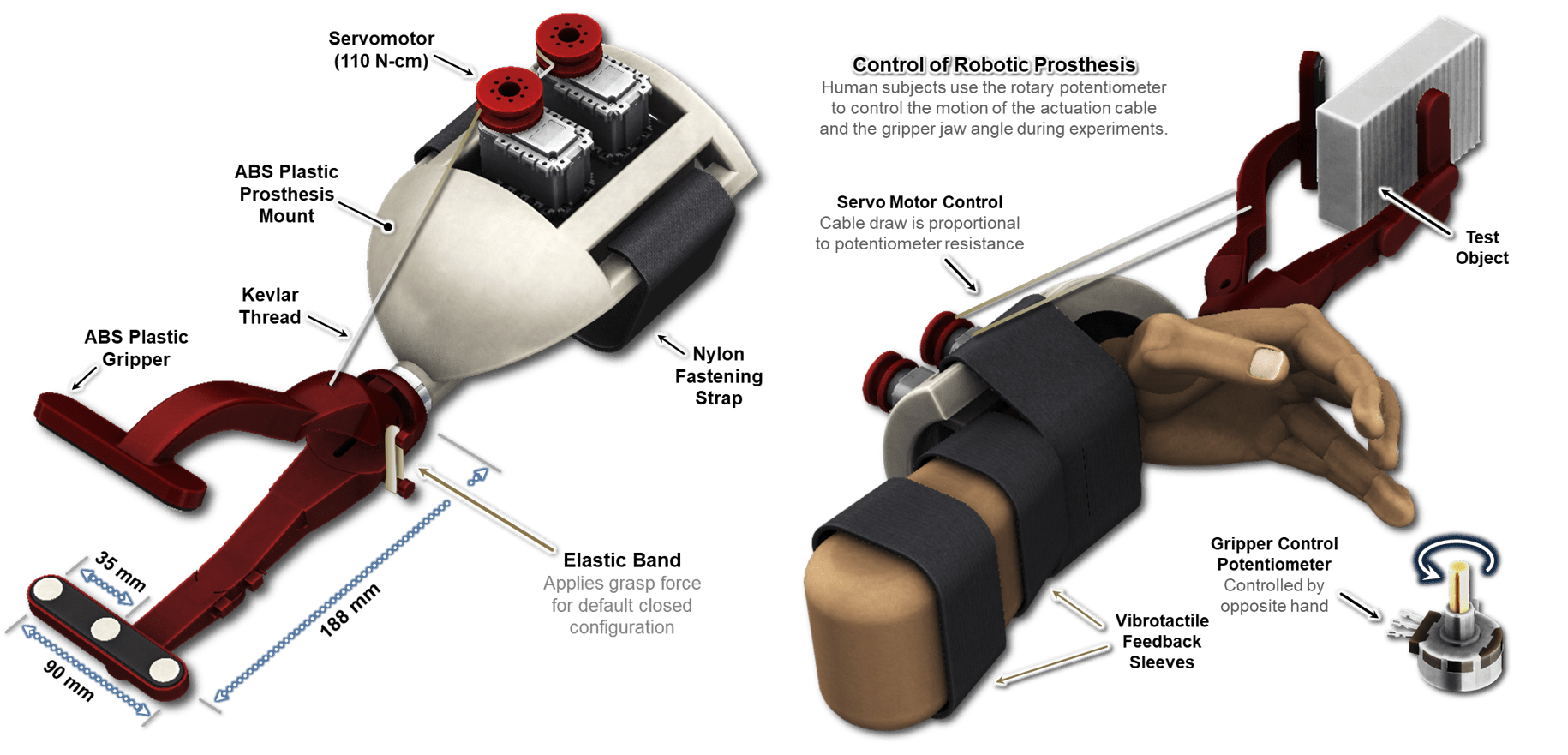
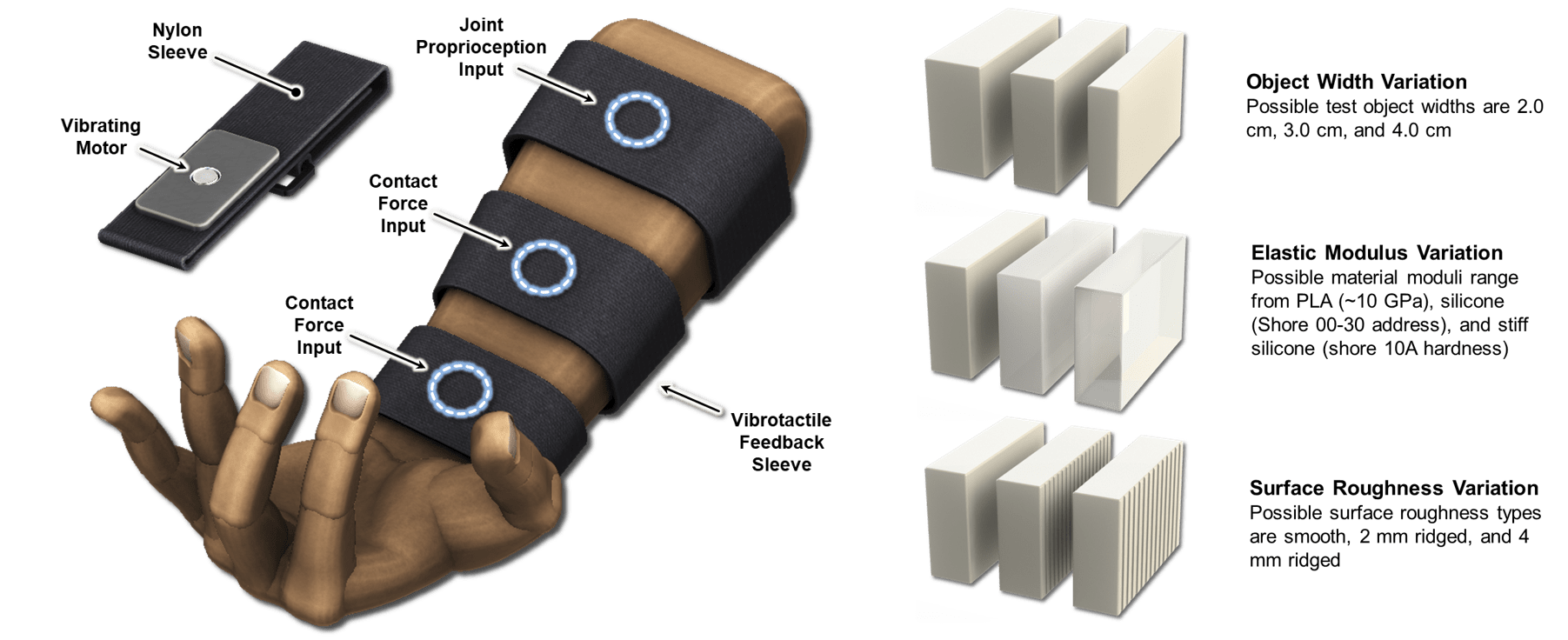
Research Focus: In this research, we investigate the use of cutaneous vibrotactile stimulation as a means of providing both haptic information and proprioceptive feedback – together called “virtual proprioception” – in a robotic upper-limb prosthesis. The study involves the design of a powered, sensory-enabled split-hook prosthesis (Fig. 1), the implementation of a multimodal vibrotactile feedback display (Fig. 2), and experimental data on the use of this sensory-enabled device to manipulate objects and sense the state of the prosthesis without the need for visual inspection. Technical contributions include insights on vibrotactile feedback for displaying different device-environment interactions and prescriptions for both prosthesis and feedback display design. The significance of this study lies in the fact that there is still a lack of objective measurement of the advantages of using augmented tactile feedback as well as the evaluation of which information should be provided by these feedback modes.
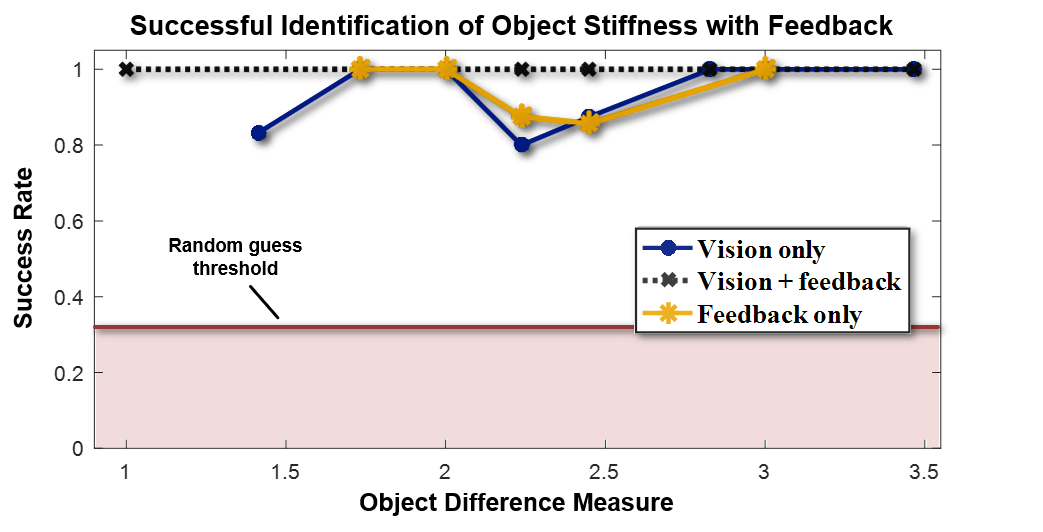
Findings and Implications: Experimental evaluation of vibrotactile feedback during object grasping tasks showed that it allowed human subjects to accurately determine object properties, at an 85.4% success rate, without any need for visual inspection of the object being manipulated. In addition, it showed that multimodal vibrotactile feedback resulted in slightly better object identification than vision alone, which had an 85.3% success rate. The ability to enable virtual proprioception in powered upper-limb prostheses can significantly lower cognitive loading, improving device utility and user adoption rates.
The results of these experiments demonstrate that multimodal sensory feedback is effective in enabling proprioception and reliable perception of prosthesis interaction with visual inspection. It is unknown, however, what effects persistent use of such feedback will have on a prosthesis user’s somatosensory pathways, whether neural reorganization and strengthening of neuromotor control pathways take place as the user incorporates the device into their self-image, and what the psychophysical implications of such neurological adaptations are. In addition, human factors considerations associated with cutaneous vibrotactile stimulation, such as mechanotactile desensitization and skin irritation, must be investigated to establish safer more effective usage models.
People
- Joshua Lee (PhD Student)
- Jihwan Jung (Masters Student)
- Mihyun Choi (Undergraduate Researcher)
Publications
- J. Lee, J.H. Jung, M.H. Choi, and F. Hammond III, Multimodal Sensory Feedback for Virtual Proprioception in Powered Upper-Limb Prostheses, IEEE International Symposium on Robot and Human Interactive Communication, 2017 (Accepted for Publication, Kazuo Tanie Award Nominee).
- M.H., Choi, J. Lee, and F. Hammond III, Wearable Olfactory Augmentation Device for Hazardous Gas Detection. In Frontiers in Biomedical Devices (Vol. 40789, p. V001T10A014). American Society of Mechanical Engineers, 2018, April.