Motivation: Many robotic manipulators are composed of rigid linkages actuated by electric motors (i.e. robotic arms on factory floors). These systems can achieve fast and precise motions but have high inertia and stiffness, making them ill-suited for direct interaction with people. Conversely, soft robots are composed of compliant and lightweight materials that are better suited for wearable robotic devices such as prosthetics and orthotics, as well as robots that interface directly with humans, including rehabilitation systems and assistive homecare robots for the physically impaired (Fig. 1).
artificial muscles: EGaIn sensors are used to estimate linkage angle and joint stiffness in real time.
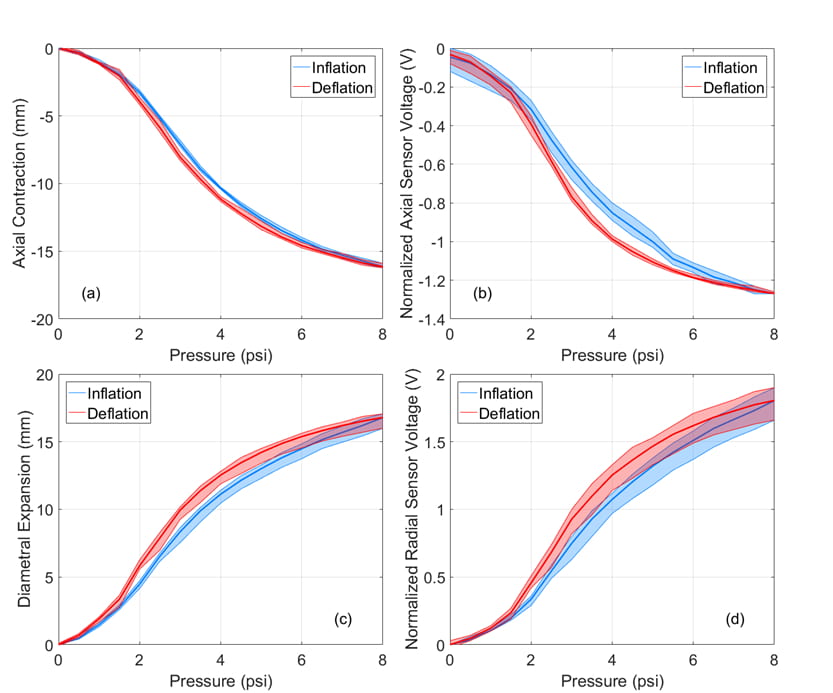
Research Focus: One of the most important components of a soft robotic system is the soft pneumatic actuator. A soft actuator – generally composed of hyperelastic rubber bladders strategically embedded with strain-limiting fibers – is designed to deform under internal pressurization to create combinations of linear, bending, and twisting motions and corresponding forces/torques. The compressibility of air combined with the relatively low stiffness of soft actuator materials inherently provides devices utilizing these actuators with a significant degree of tunable compliance. Furthermore, the lightweight composition of soft actuators yields a high power-to-weight ratio ideal for wearable devices. However, the large and nonlinear deformation behaviors of soft actuators make them difficult to measure with traditional sensors and encoders and challenging to analytically model (Fig. 2). This presents a unique control challenge that must be addressed in order to take advantage of soft pneumatic actuation in a robotic system.
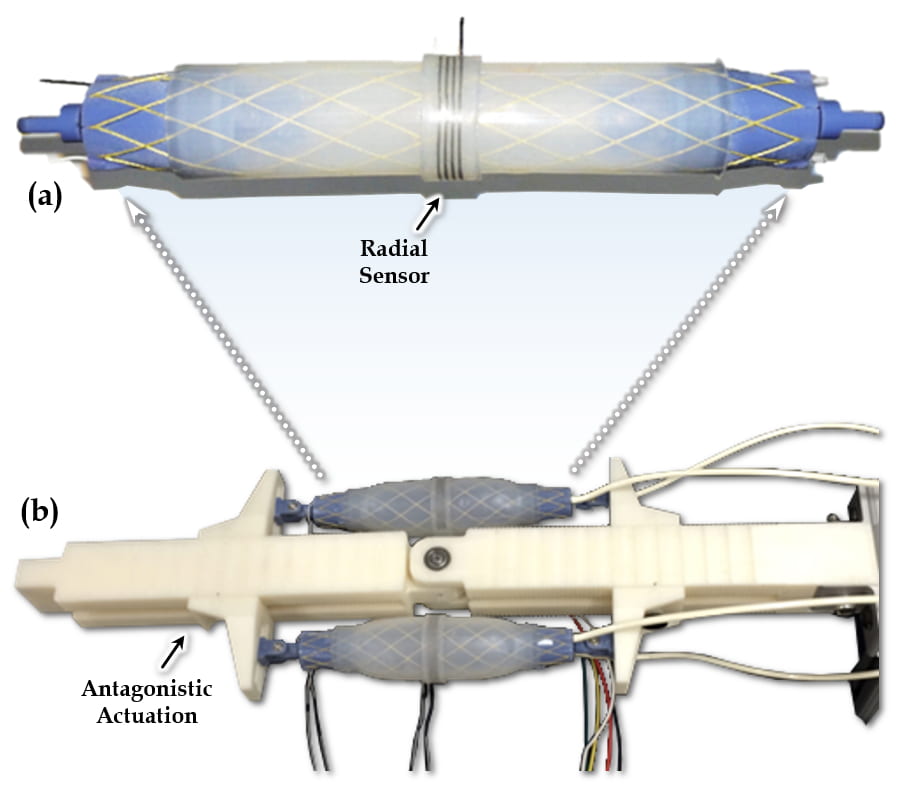
view of a pneumatic artificial muscle showing internal EGaIn length sensor (bottom).
Our current work is addressing this challenge via unique design and system modeling approaches: one direction of research is to develop soft, flexible sensing technologies that can be directly incorporated into soft actuators to estimate actuator deformations and applied forces in real-time without extra cumbersome hardware; The other direction is to explore machine learning and system identification techniques to empirically characterize the dynamics of soft-actuated systems and to use the learned system dynamics to perform model-based control. Our ultimate goal is to combine the results of both approaches to demonstrate precise motion and force control of soft robotic systems in realistic human-robot interaction applications.
People
- Lucas Tiziani (PhD Student)
- Alex Hart (Masters Student)
- Thomas Cahoon (Research Engineer)
Publications
- L. Tiziani, A. Hart, T. Cahoon, F. Wu, H. H. Asada, and F. Hammond III, Empirical Characterization of Modular Variable Stiffness Inflatable Structures for Supernumerary Grasp Assist Devices, The Int. Journal of Robotics Research, 2017, p.0278364917714062.
- L. Tiziani, T. Cahoon, and F. Hammond III, Sensorized Pneumatic Muscle for Force and Stiffness Control, International Conference on Robotics and Automation, 2017.
- F. Hammond III, F. Wu, and H. Asada, Variable Impedance Pneumatic Structures for Wearable Supernumerary Robotic Devices, International Symposium on Robotics Research, 2015.