Motivation: Biological fish differ widely in anatomical structure (body stiffness, fin, body length, etc.) and swimming gait, and it is known that their physical characteristics have a close correlation to their locomotion capabilities. By systematically studying these correlations between the soft body structures of a fish-vertebrate-mimicking swimming robot and its swimming efficiency, we can elucidate the relationships between form and function and provide guidance on the design of non-biomorphic swimming robots capable of performing multiple underwater maneuvers (Fig. 1).
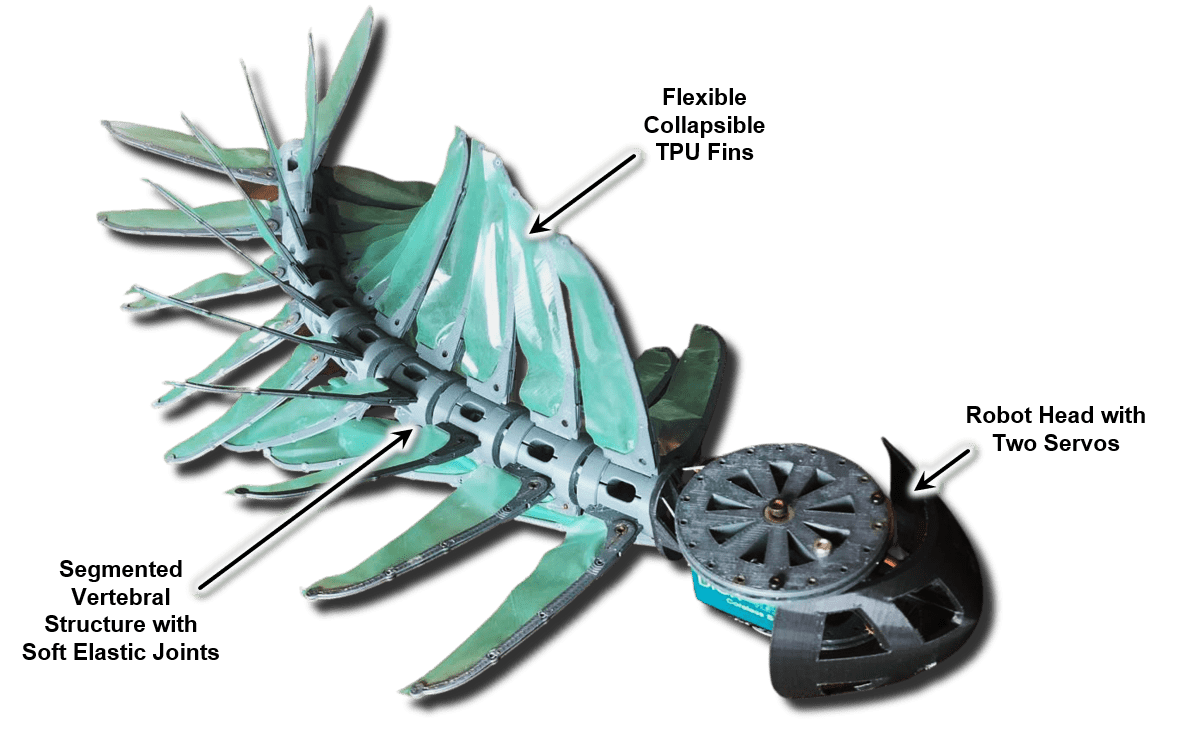
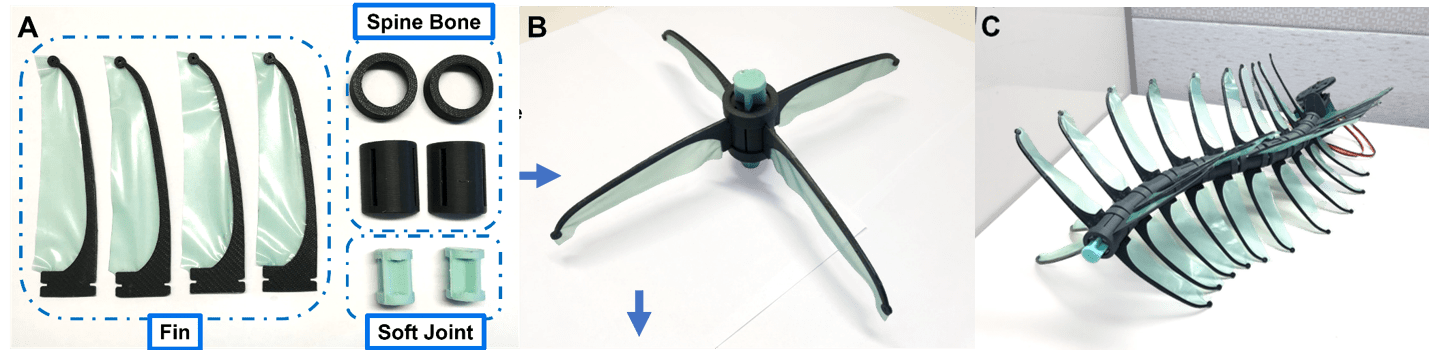
Research Focus: We designed a soft modular swimming robot platform to systematically explore the relationship between body structure, swimming gaits, and locomotion performance (Fig. 2). The swimming robot platform includes an underactuated, cable-driven design that mimics the cascaded skeletal structure of soft spine tissue and hard spine bone seen in many fish species. The modular platform design allows for easy modification of morphological parameters such as fin configuration, soft joint stiffness distribution, and body length, to vary the robot’s swimming mode (Fig. 3).
Findings and Implications: Preliminary tests show that the swimming robot can change swimming direction from forward to backward, and change swimming mode from oscillatory to undulatory, only by tuning the oscillation frequency.
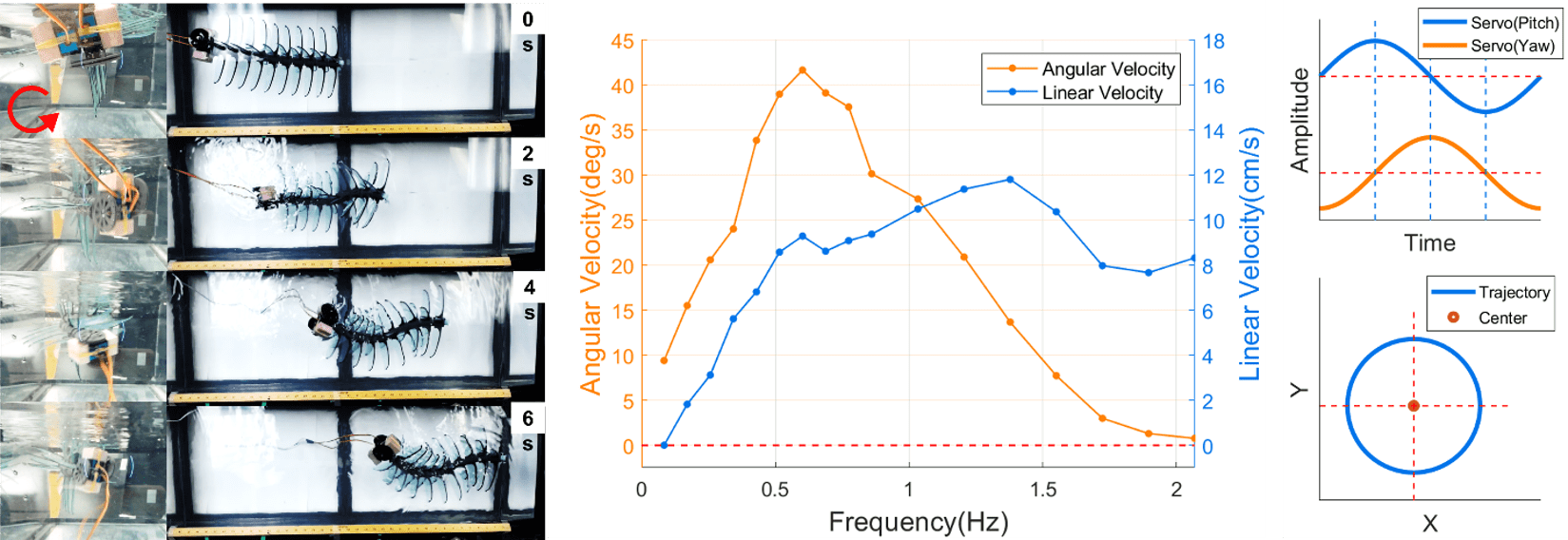
Besides common maneuvers (undulatory surging, pitch/yaw rotation), we attempt to implement and effectively control the roll rotation by mimicking this kind of efficient biomorphic roll mechanism on our two degrees of freedom (DOF) soft modular swimming robot. The robot can perform a steady and controllable roll rotation with a maximum angular speed of 41.6 deg/s. Preliminary results show a linear relationship between roll angular velocity and frequency within a specific range (Fig. 4).
Researchers
- Bangyuan Liu (PhD Student)
Publications
- Modular Platform for the Exploration of Form-Function Relationships in Soft Swimming Robots, B. Liu and F. Hammond III, In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft),, pp. 772-778. (DOI)
- Demonstration of a Novel Phase Lag Controlled Roll Rotation Mechanism using a Two-DOF Soft Swimming Robot, B. Liu and F. Hammond III, In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1705-1710. (DOI)